



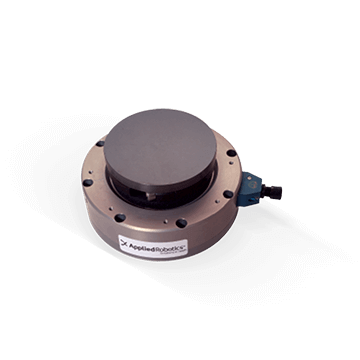





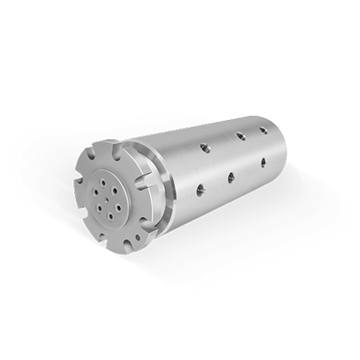









Joint tournant | 1 passage | SCS(M) 608010
Joint tournant à usage alimentaire, connexion tri-clamp

La gamme des raccords tournants SCSM se caractérise par des connexions par bagues tri-clamp et sont approuvé en qualité alimentaire (FDA) pour une utilisation dans des systèmes propres CIP (Clean-in-Place).
La gamme de raccords SCSM est conçue pour minimiser les endroits de stagnation du fluide avec des lignes d'écoulement adoucies pour un transfert de fluide propre.
Ces joints tournants disposent de roulements spécifiques de qualité alimentaire placés dans une chambre étanche afin de maintenir la lubrification à l'intérieur et la contamination à l'extérieur.
Avantages
- Longue durée de vie
- Chambres de roulements à lubrification permanente
- Nettoyable en place
Bénéfices
- Epargne le recours à une tuyauterie complexe
- Performances machines accrues
- Maintenance de tuyauterie réduite
Industries liées


A votre service
Besoin d'aide pour sélectionner le bon produit ?
Besoin de plus d'information ?
Contactez-nous